

Tel: 137-2421-1742 E-mail: paul@rdbuy.cn
ICP備案證書號:粵ICP備12082730號-1
共執行 65 個查詢,用時 0.026971 秒,在線 190 人,Gzip 已啟用,占用內存 2.498 MB
Powered by ECShop v4.0.1






![CMR3000-D01 vti消費級三軸陀螺儀[停產]](images/201212/thumb_img/380_thumb_G_1356333795911.jpg)








傳統的陀螺儀主要是利用角動量守恒原理,因此它主要是一個不停轉動的物體,它的轉軸指向不隨承載它的支架的旋轉而變化。
但是微機械陀螺儀的工作原理不是這樣的,因為要用微機械技術在硅片襯底上加工出一個可轉動的結構可不是一件容易的事。微機械陀螺儀利用科里奧利力——旋轉物體在有徑向運動時所受到的切向力。下面是導出科里奧利力的方法。有力學知識的讀者應該不難理解。
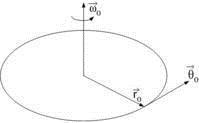
在空間設立動態坐標系。用以下方程計算加速度可以得到三項,分別來自徑向加速、科里奧利加速度和向心加速度。
科里奧利力
.jpg)
動態坐標系
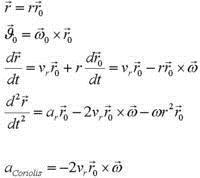
公式推導
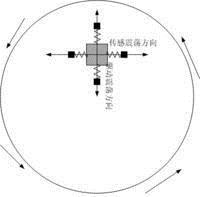
如果物體在圓盤上沒有徑向運動,科里奧利力就不會產生。因此,在MEMS陀螺儀的設計上,這個物體被驅動,不停地來回做徑向運動或者震蕩,與此對應的科里奧利力就是不停地在橫向來回變化,并有可能使物體在橫向作微小震蕩,相位正好與驅動力差90度。MEMS陀螺儀通常有兩個方向的可移動電容板。徑向的電容板加震蕩電壓迫使物體作徑向運動(有點象加速度計中的自測試模式),橫向的電容板測量由于橫向科里奧利運動帶來的電容變化(就象加速度計測量加速度)。因為科里奧利力正比于角速度,所以由電容的變化可以計算出角速度。
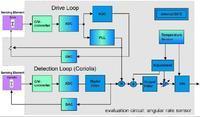
BOSCH SMG 070原理圖
2軸MEMS陀螺儀。它采用了閉合回路、數字輸出和傳感器芯片跟ASIC芯片分開平放連線的封裝方法。
微機械陀螺儀的設計和工作原理可能各種各樣,但是公開的微機械陀螺儀均采用振動物體傳感角速度的概念。利用振動來誘導和探測科里奧利力而設計的微機械陀螺儀沒有旋轉部件、不需要軸承,已被證明可以用微機械加工技術大批量生產。
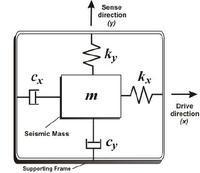
為機械陀螺結構示意圖
絕大多數微機械陀螺儀依賴于由相互正交的振動和轉動引起的交變科里奧利力。振動物體被柔軟的彈性結構懸掛在基底之上。整體動力學系統是二維彈性阻尼系統,在這個系統中振動和轉動誘導的科里奧利力把正比于角速度的能量轉移到傳感模式。
通過改進設計和靜電調試使得驅動和傳感的共振頻率一致,以實現最大可能的能量轉移,從而獲得最大靈敏度。大多數微機械陀螺儀驅動和傳感模式完全匹配或接近匹配,它對系統的振動參數變化極其敏感
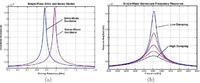
驅動和感應的頻寬
,而這些系統參數會改變振動的固有頻率,因此需要一個好的控制架構來做修正。如果需要高的品質因子(Q),驅動和感應的頻寬必須很窄。增加1%的頻寬可能降低20%的信號輸出。(上圖a) 還有阻尼大小也會影響信號輸出。(上圖b)
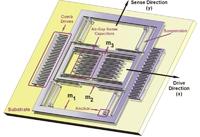
一般的微機械陀螺儀由梳子結構的驅動部分和電容板形狀的傳感部分組成。有的設計還帶有去驅動和傳感耦合的結構。
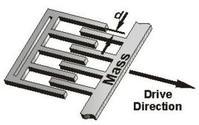
梳子結構的驅動部分
傳感耦合的結構